AGV/AMR Industrial Material Handling Solutions
บริษัท TKK Corporation และบริษัทในเครือ KSI Solution สามารถบริการให้คำแนะนำ ออกแบบและติดตั้งระบบเคลื่อนย้ายวัสดุ Material Handling ในโรงงานอุตสาหกรรม และ Warehouse โดยไม่ต้องใช้คน เป็น Smart Factory and Smart Warehouse เพื่อเพิ่มประสิทธิภาพ ความถูกต้อง และลดค่าใช้จ่ายของผู้ประกอบการ

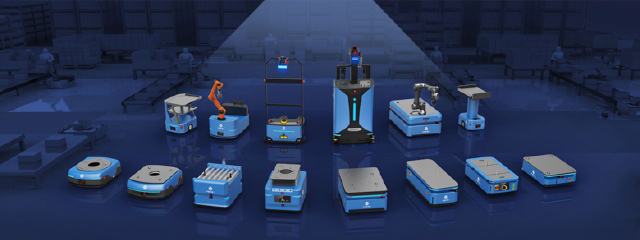
ทางบริษัทฯ TKK มีแบบของ AGV (Automated Guide Vehicle) และ AMR (Autonomous Mobile Robot) ให้เลือกหลากหลายตามความต้องการ

นอกจากจะมีแบบตัวรถให้เลือกหลากหลายแล้ว เรายังมีระบบนำทางให้เลือกครบทุกความต้องการ เช่น
- Magnetic Tape
- QR Code
- LiDAR SLAM
- Hybrid Navigation (Magnet + QR Code or QR Coder + LiDAR SLAM)
Under Drive Lifting (Latent Jacking Robots)
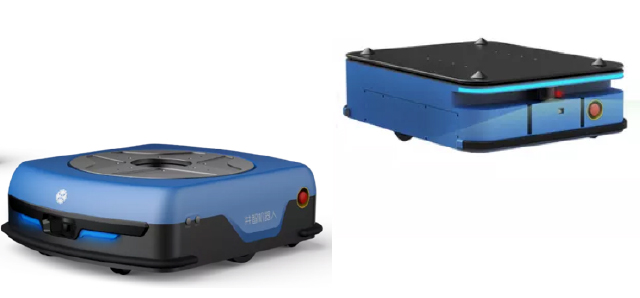
เป็น AGV หรือ AMR ที่วิ่งเข้าไปใต้ชั้นวาง (Rack) แล้วหุ่นจะมีระบบยกชั้นวางขึ้นลอยจากพื้น จากนั้นหุ่นจะเคลื่อนย้าย Rack หมุนปรับทิศทางได้ แล้วจะวิ่งไปวางในตำแหน่งที่ต้องการ
W500 Under Drive Lifting 500kg. Robot
Two-dimensional code navigation technology
500 KG payload
Improves 60-80% storage
picking accuracy is up to 99.99%
Application scenario:
- logistics,
- warehousing,
- e-commerce retail,
- pharmaceutical,
- manufacturing and etc.

| Dimension | L860*W680*H285mm |
|---|---|
| Payload | 500 KG |
| Moving speed | 1.5 – 2.0m/s |
| Net weight | 140 KG ( ±5 KG ) |
| Diameter of lifting module | 600mm |
| Lifting height | 40mm |
| Posintioning accuracy | ±10mm |
| Battery | DC 48V, 40AH |
| Moving type | Horizontal linear moving |
| Moving alarm | sound + light |
| Turning radius | 0 ( can 90°, 180°, 270° turning ) |
| Guiding method | Interal guidance + two-dimensional code guidance |
| Driving method | Servo motor, two-wheel differential drive |
| Anti-collision method | Lidar anti-collision |
| Communication< | WiFi |
| Charging method | Auto-charging / manual charging |
| Full-load work time | >5H |
| No-load work time | >10H |
| Max speed ( full-load ) | 1 – 1.5 m/s |
| Max speed ( no-load ) | 1.5 – 2.0 m/s |
| API support | Support |
W1000 Under Drive Lifting 1,000kg. Robot
Two-dimensional code navigation technology
1,000 KG payload
Improves 60-80% storage
picking accuracy is up to 99.99%
Application scenario:
- logistics,
- warehousing,
- e-commerce retail,
- pharmaceutical,
- manufacturing and etc.

| Dimension | L910*W760*H285mm |
|---|---|
| Payload | 1,000 KG |
| Moving speed | 1.5 – 2.0m/s |
| Net weight | 200 KG ( ±5 KG ) |
| Diameter of lifting module | 600mm |
| Lifting height | 55mm |
| Posintioning accuracy | ±10mm |
| Battery | DC 48V, 40AH |
| Moving type | Horizontal linear moving |
| Moving alarm | sound + light |
| Turning radius | 0 ( can 90°, 180°, 270° turning ) |
| Guiding method | Interal guidance + two-dimensional code guidance |
| Driving method | Servo motor, two-wheel differential drive |
| Anti-collision method | Lidar anti-collision |
| Communication | WiFi |
| Charging method | Auto-charging / manual charging |
| Full-load work time | >5H |
| No-load work time | >10H |
| Max speed ( full-load ) | 1 – 1.5 m/s |
| Max speed ( no-load ) | 1.5 – 2.0 m/s |
| API support | Support |
W500SL Under Ride Lifting AGV
LiDAR SLAM navigation technology
500 KG payload
Application scenario:
- Smart logistics
- Smart Factory
- warehouse, etc.

Specification
| Specification | Name | Latent jacking AGV |
|---|---|---|
| Model | W500SL | |
| Rated load (kg) | 500KG | |
| Self weight (kg) | 220(±10KG) | |
| Positioning accuracy (mm) | +/-10mm | |
| Jacking height (mm) | 60mm | |
| Dimension (L * w * h) mm | 980* 700 * 425mm (excluding anti-collision strip) | |
| Navigation mode | LIDAR SLAM Navigation | |
| Parameter | Driving mode | Servo motor / two wheel differential drive |
| control mode | Manual / automatic | |
| Form of motion | Horizontal linear motion | |
| Unloading max Operating speed | 1.7m/s | |
| Fullolad Operating speed | 1.0m/s | |
| Jacking time | < 12s | |
| Orientation accuracy | ±0.5° | |
| Acceleration time (no load) | 3S | |
| Acceleration time (full load) | 5S | |
| Body rotation speed (90 degrees) | <1.5s | |
| Body rotation speed (180 degrees) | < 3/s | |
| Battery | Driving voltage (V) | DC48V |
| Battery capacity | 40AH | |
| Battery type | Lithium iron phosphate | |
| Battery life | 1500 cycles, capacity ≥ 80% | |
| Endurance time | ≥ 8h | |
| Charging time | ≤1.5h | |
| Charging mode (optional) | Off line charging / automatic charging | |
| safety | Anti collision mode | Lidar obstacle avoidance |
| Front and rear crash strips to avoid obstacles | ||
| Emergency stop | Front and rear emergency stop buttons |
W1000SL Under Ride Lifting AGV
LiDAR SLAM navigation technology
1000 KG payload
Application scenario:
- Smart logistics
- Smart Factory
- warehouse, etc.

Specification
| Specification | Name | Latent jacking AGV |
|---|---|---|
| Model | W1000SL | |
| Rated load (kg) | 1000KG | |
| Self weight (kg) | 260(±10KG) | |
| Positioning accuracy (mm) | + 10mm | |
| Jacking height (mm) | 60mm | |
| Dimension (L * w * h) mm | 1200 * 800 * 420mm (excluding anti-collision strip) | |
| Navigation mode | LiDAR SLAM Navigation | |
| Parameter | Driving mode | Servo motor / two wheel differential drive |
| control mode | Manual / automatic | |
| Form of motion | Horizontal linear motion | |
| Unloading max Operating speed | 1.7m/s | |
| Fullolad Operating speed | 0.8m/s | |
| Jacking time | < 10s | |
| Orientation accuracy | ±0.5° | |
| Acceleration time (no load) | 3S | |
| Acceleration time (full load) | 5S | |
| Body rotation speed (90 degrees) | <1.5s | |
| Body rotation speed (180 degrees) | < 3/s | |
| Battery | Driving voltage (V) | DC48V |
| Battery capacity | 40AH | |
| Battery type | Lithium iron phosphate | |
| Battery life | 1500 cycles, capacity ≥ 80% | |
| Endurance time | ≥ 8h | |
| Charging time | ≤1.5h | |
| Charging mode (optional) | Off line charging/automatic charging | |
| safety | Anti collision mode | LiDAR obstacle avoidance |
| Front and rear crash strips to avoid obstacles | ||
| Emergency stop | Front and rear emergency stop buttons |
TKK Corporation ยังมีระบบ Mobile Robots Solution ที่เหมาะสมกับความต้องการของลูกค้า ท่านสามารถติดต่อเพื่อขอคำแนะนำได้ทันที ทั้งนี้ บริษัทฯขอแนะนำ สำหรับการเลือก AGV/AMR ไปใช้ในโรงงานอุตสาหกรรม ว่าควรเป็นระบบ LiDAR SLAM ที่มีข้อดีดังนี้
LiDAR (Laser Light Data Ranging) คือการใช้ Laser Scan ในการสแกนไปรอบๆตัว AMR เพื่อตรวจจับวัตถุ คนงาน หรือสิ่งของต่างๆ เพื่อเป็นเป็นข้อมูลในการกำหนดเส้นทางการวิ่ง และหลบหลีกสิ่งกีดขวางได้โดยอัตโนมัติ
SLAM (Simultaneous Localize And Mapping) คือระบบ Controller Computer On-Board ที่ติดตั้งอยู่ใน AMR โดยการนำข้อมูลจากเซ็นเซอร์ต่างๆ เช่น จาก Servo Motor Encoder, LiDAR, IMU มาประมวลผลแบบ Real-Time เพื่อกำหนดทิศทางการวิ่งอย่างชาญฉลาด
(Naturized Navigation) คือการที่ตัวหุ่น AMR สามารถวิ่งหลบหลีกสิ่งกีดขวางไดอย่างชาญฉลาดเพื่อไปยังจุดหมายได้อย่างแม่นยำ
ระบบนี้ทำให้การใช้งาน AMR มีความสะดวก ไม่ต้องติดตั้งอุปกรณ์นำทาง เช่น Magnet Tape หรือ QR Code ทำให้การนำเอา AMR ไปใช้งานมีความสะดวก ใช้เวลาติดตั้งน้อย ไม่ต้องคอยดูแลอุปกรณ์นำทาง เช่น Magnet Tape หรือ QR Code ทำให้ประหยัดค่าใช้จ่ายในการใช้ ตลอดอายุการใช้งาน