

Mitsubishi Bin Picking Robots

Bin Picking คือการใช้หุ่นยนต์ในการหยิบชิ้นงานจากในภาชนะบรรจุ เช่น จากในกล่อง, Pallet ได้โดยตรง โดยไม่จำเป็นจะต้องจัดเรียงชิ้นงานไว้ก่อน หุ่นยนต์จะหยิบและวางชิ้นงานในตำแหน่งที่ต้องการได้โดยอัตโนมัติ

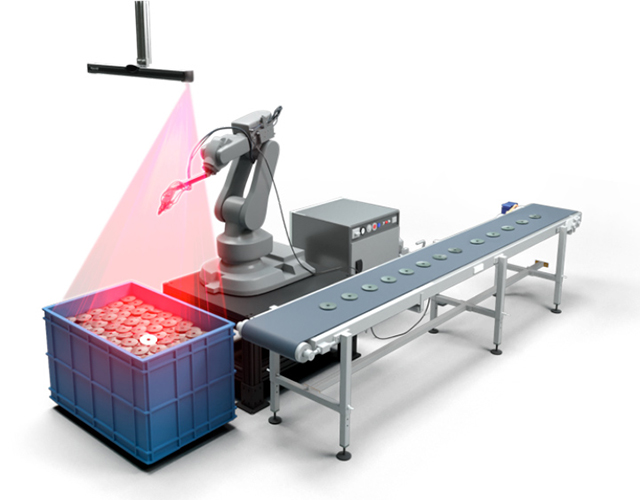
บริษัท TKK Corporation Co.,Ltd. ซึ่งเป็นตัวแทนจำหน่ายอย่างเป็นทางการ ร่วมมือกับ Mitsubishi Electric Factory Automation Thailand ขอนำเสนอ หุ่นยนต์หยิบจับชิ้นงานที่ทำงานร่วมกับกล้องสามมิติ (3D Camera Bin Picking Robots) โดยการ integrated 3D Camera ร่วมกับ Mitsubishi Industrial Robots จึงทำให้หุ่นยนต์สามารถทำงานเหมือนกับว่ามีตามองเห็นชิ้นงานได้ทั้งสามมิติ (ทั้ง 3 แกน X, Y, Z) ทำให้หุ่นยนต์สามารถหยิบชิ้นงานได้อย่างแม่นยำ แม้ว่าชิ้นงานจะวางอยู่ปะปนกันแบบไร้ทิศทาง และวางอยู่ในตำแหน่ง สูง-ต่ำ ที่ไม่เท่ากัน หุ่นยนต์ก็จะรู้ตำแหน่งและหยิบชิ้นงานได้อย่างถูกต้องแม่นยำ ทำให้การใช้งาน Industrial Robots ต่อจากนี้ไปมีความสะดวกและยืดหยุ่น ไม่จำเป็นที่จะต้องวางตำแหน่งชิ้นงานในตำแหน่งที่เดิมตลอดเวลา สามารถวางชิ้นงานในตำแหน่งใดก็ได้ หรือแม้แต่วางชิ้นงานกองรวมกันใน ถาด, กล่อง, บนพาเล็ต หรือถังใส่ชิ้นงาน หุ่นยนต์สามารถหยิบชิ้นงานได้ทุกชิ้นได้อย่างถูกต้อง เราจึงเรียก Applications การหยิบงานในลักษณะนี้ว่า Bin Picking Robots
คุณสมบัติเด่น
- ใช้กล้อง 3D Vision ทำให้รู้ตำแหน่งชิ้นงานทั้งแนวแกน x, y, z
- หุ่นยนต์สามารถหยิบชิ้นงานได้อย่างแม่นยำ แม้งานจะวางปะปนกันแบบไร้ทิศทาง
- สามารถหยิบชิ้นงานที่ตำแหน่ง สูง-ต่ำ ไม่เท่ากันได้โดยอัตโนมัติ
- ไม่จำเป็นจะต้องมี Jig/Fixture เพื่อวางชิ้นงาน
- ไม่จำเป็นจะต้องมีระบบ Parts Feeder เพื่อเรียงชิ้นงาน
- หุ่นยนต์สามารถหยิบชิ้นงานจากภาชนะบรรจุ เช่น จากในกล่องได้โดยตรง
- ประหยัดอุปกรณ์ที่ยุ่งยาก ลดเวลาและค่าใช้จ่ายในการออกแบบและติดตั้งระบบหุ่นยนต์
- มีประสิทธิภาพสูง ให้ความยืดหยุ่นในการออกแบบระบบ ใช้กับงานได้หลากหลายรูปแบบ
ตัวอย่างการใช้งาน

Pick & Place

Assembly




